多重控制智能小车
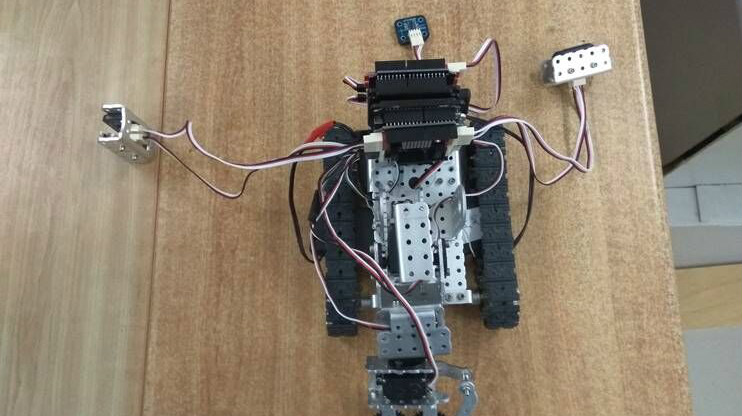
多重控制智能小车以仿生机械手臂为目标,体感操作为主要功能。(1)手部的姿势动作通过重力感应的方式控制机械手臂的姿态;(2)手持重力感应传感器,使前倾,停止,后仰,左倾,右倾与体感一致的方向,控制实现前进,停止,后退,左转,右转;(3)通过触碰传感器,机械手臂能执行简单的动作;(4)嵌入蓝牙遥控,实现远程控制;(5)履带车拥有一定的越野,与稳定性
查看应用
多重控制智能小车以仿生机械手臂为目标,体感操作为主要功能。(1)手部的姿势动作通过重力感应的方式控制机械手臂的姿态;(2)手持重力感应传感器,使前倾,停止,后仰,左倾,右倾与体感一致的方向,控制实现前进,停止,后退,左转,右转;(3)通过触碰传感器,机械手臂能执行简单的动作;(4)嵌入蓝牙遥控,实现远程控制;(5)履带车拥有一定的越野,与稳定性
查看应用